
Betrachten wir die Entwicklung eines Kettenfahrzeugs mit einem relativ einfachen Design, das buchstäblich in ein paar Abenden zusammengebaut werden kann. Die gesamte Struktur lässt sich grob in zwei Teile unterteilen – das Raupenfahrwerk und den elektrischen Teil, der die Fernsteuerung der Maschine über die Fernbedienung ermöglicht.
Fahrgestellfertigung
Es werden nicht viele Materialien benötigt: Die Ketten werden von zwei Getriebemotoren angetrieben, die Basis der gesamten Struktur wird ein kleines Stück dickes Sperrholz sein und Sie benötigen außerdem mehrere Kunststoffräder, auf denen sich die Ketten drehen. Für die Maschine können Sie fast alle Getriebemotoren geeigneter Größe verwenden, ideal sind die „gelben“, die in vielen Radioteileläden zu finden sind, oder Sie können sie bei Ali kaufen, das Getriebe darin ergibt ein Übersetzungsverhältnis von 1: 48, was für diesen Fall der optimalste Wert ist.

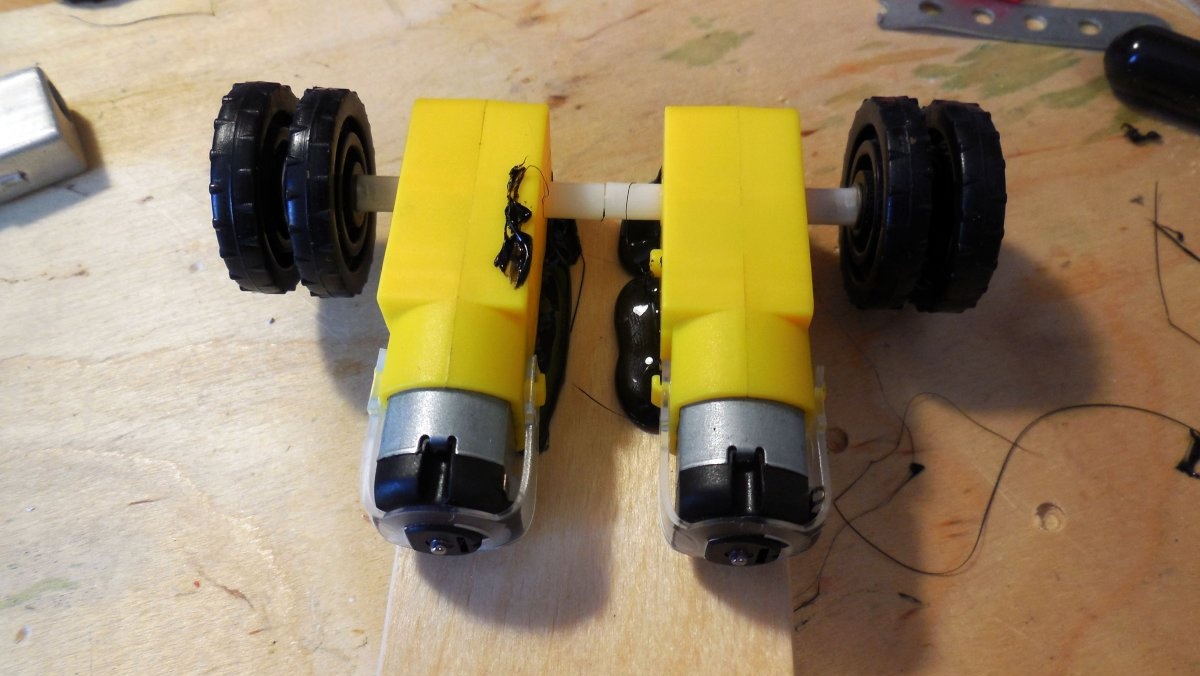
Jedes Getriebe hat einen Ausgang zu zwei Wellen auf gegenüberliegenden Seiten der Karosserie – für das Raupenfahrwerk wird nur eine Welle von jedem Motor verwendet, die zweite kann vollständig entfernt oder belassen werden, falls diese Motoren noch in anderen Projekten benötigt werden.Es ist notwendig, die Räder an den Wellen zu befestigen – am einfachsten geht das, indem man eine selbstschneidende Schraube in die Welle selbst einschraubt (sie ist innen hohl), damit die Räder gut klemmen. Zur zusätzlichen Fixierung und um ein Abdrehen der selbstschneidenden Schraube zu verhindern, können Sie die Verbindung großzügig mit Kleber einfetten. Bitte beachten Sie, dass das Rad doppelt ist – zwischen jedem Rad entsteht ein Spalt von ca. 3-4 mm, damit wird in Zukunft die Raupe fixiert.

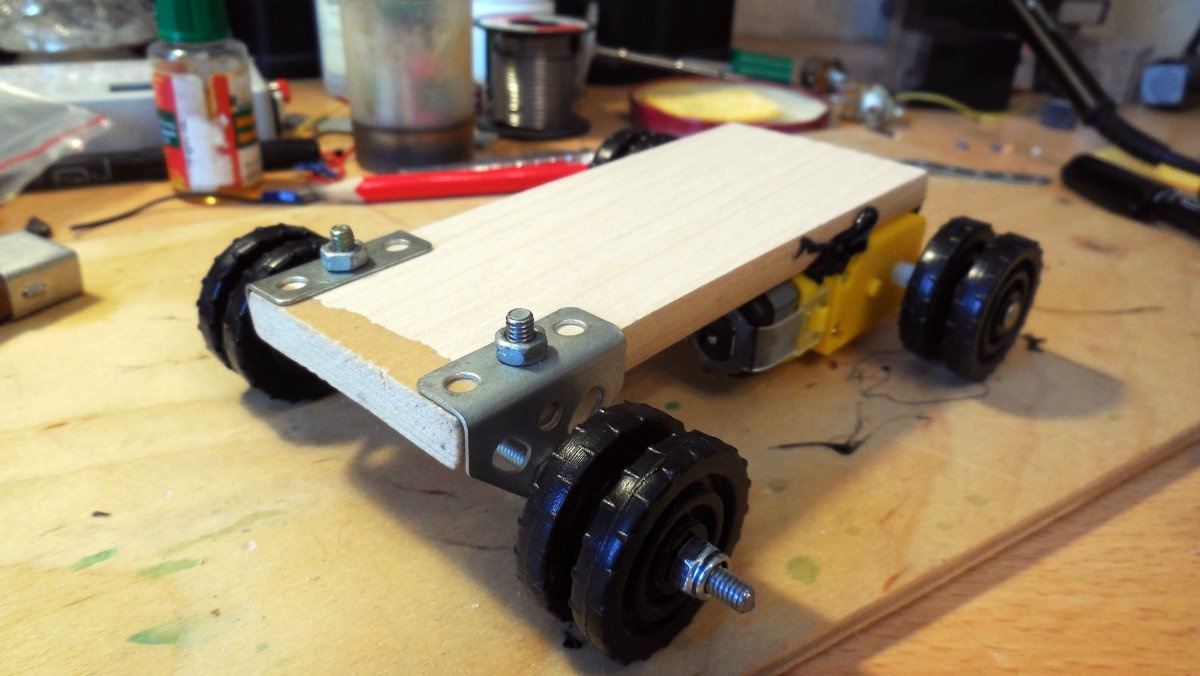
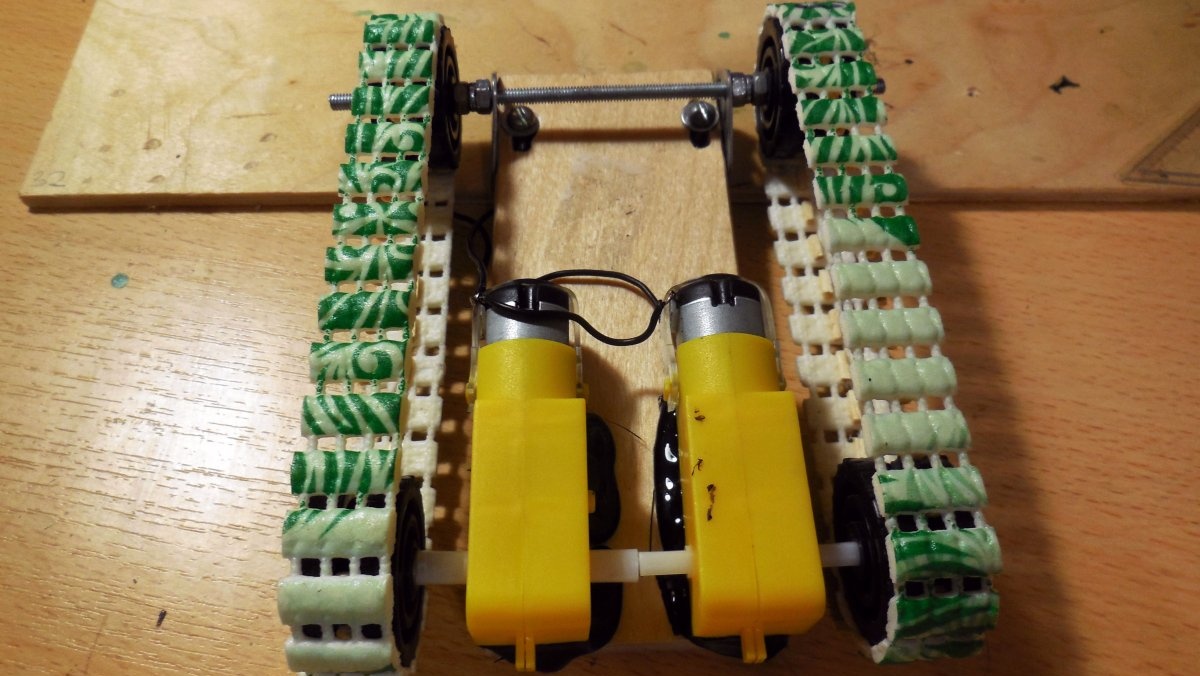
Die Motoren sind auf einem Stück haltbarem Sperrholz montiert, dessen Größe je nach gewünschter Maschinengröße beliebig gewählt werden kann. Da diese Getriebemotoren keine geeigneten Befestigungsmöglichkeiten bieten, habe ich sie mit Heißkleber befestigt – gute Klebestifte sorgen erfahrungsgemäß für eine hervorragende Verbindungsqualität.
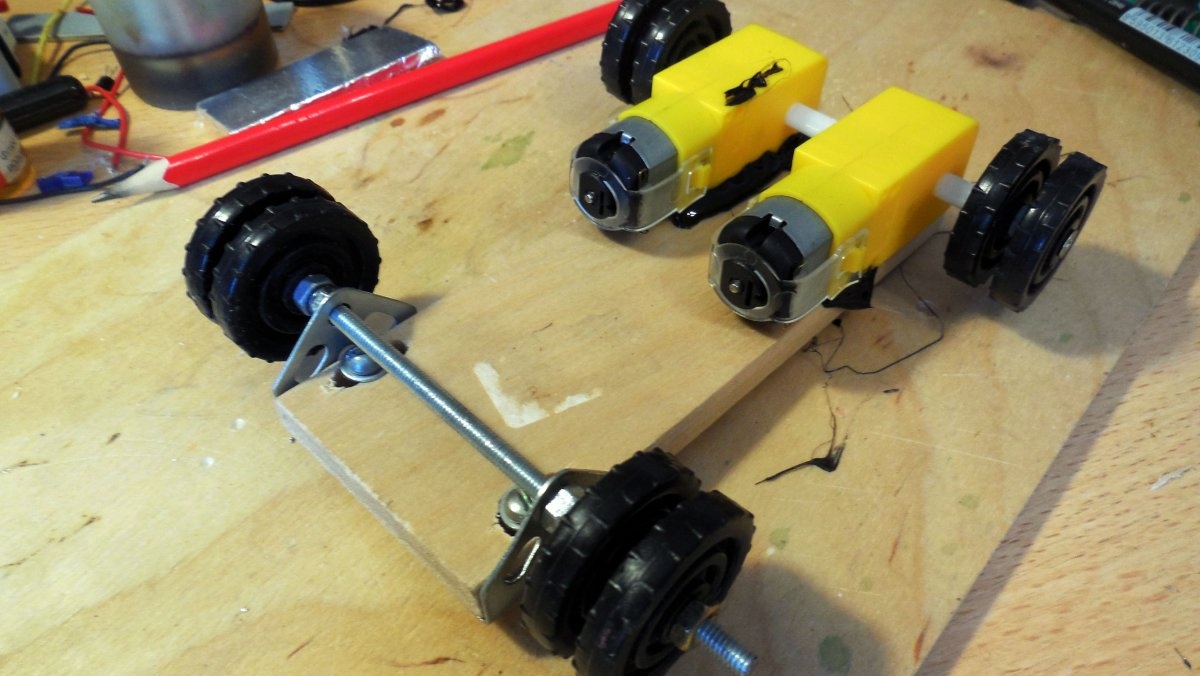
Als nächstes müssen Sie auf der gegenüberliegenden Seite der Motoren die Ecken für die Achse der Vorderräder befestigen. Hierfür empfehle ich dringend, Teile aus einem Kinder-Eisenbaukasten zu verwenden – dort finden Sie fertige Ecken mit Löchern. Wenn Sie ein Loch in Sperrholz bohren, müssen Sie berücksichtigen, dass Sie in Zukunft die Spannung der Schienen anpassen müssen, also müssen Sie eine Reihe von Löchern mit einer Länge von etwa 1 bis 1,5 cm bohren, die dann zu einem einzigen verbunden werden länglicher Schlitz. Auf diese Weise bewegt sich die gesamte Vorderachse verschraubt hin und her.

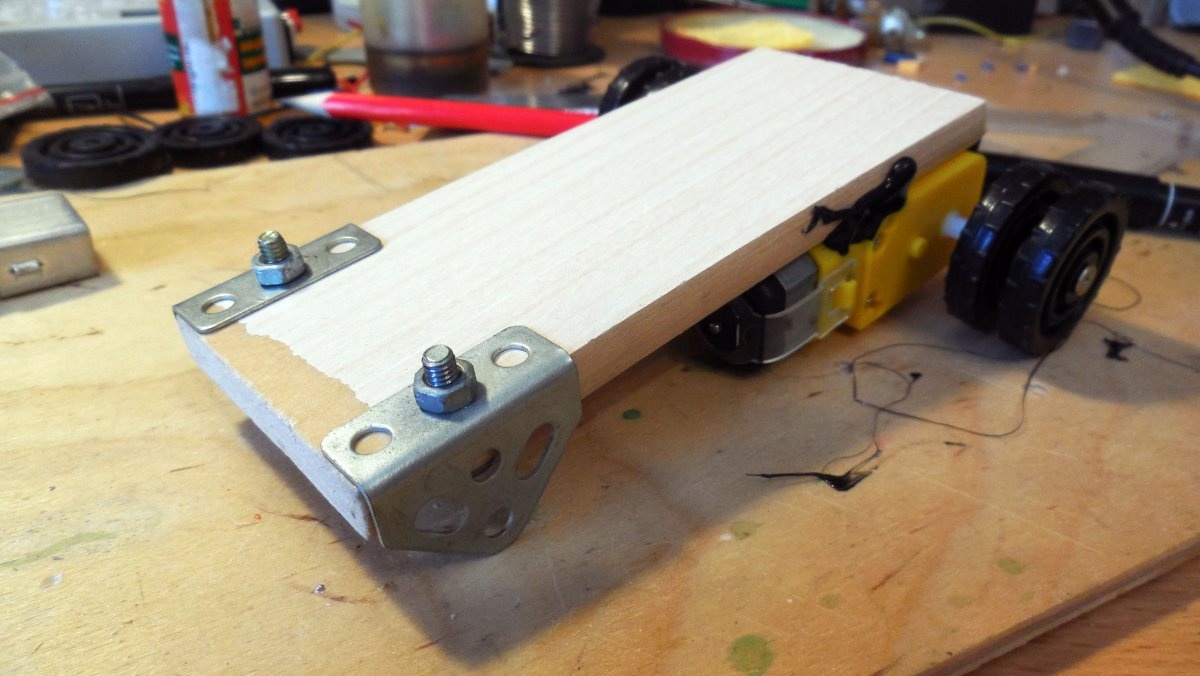
In die Löcher in den Ecken wird ein Stift eingefädelt; die Verwendung von M4 ist praktisch, er sorgt für ausreichende Steifigkeit und passt gleichzeitig in die Löcher in den Teilen des Eisenkonstruktors. Der Bolzen muss fest an den Ecken befestigt sein; hierfür ist es zweckmäßig, Sicherungsmuttern zu verwenden; diese lösen sich nicht von selbst, wenn die Maschine in Bewegung gesetzt wird. An den Seiten sind die gleichen Doppelräder wie am Heck verbaut, mit exakt gleichem Abstand.Die Räder müssen sich frei auf der Achse drehen können, dies kann mit den gleichen Sicherungsmuttern sichergestellt werden. Bitte beachten Sie, dass sich das linke und das rechte Rad unabhängig voneinander drehen müssen. Ich habe diese Räder aus demselben Eisenbaukasten genommen, aber man kann ähnliche aus Plastik oder dickem Karton schneiden, indem man sie in mehreren Schichten faltet und zusammenklebt.
Raupen herstellen
Man kann sich kaum vorstellen, dass sich aus einer PVC-Badematte, die in fast jedem Baumarkt erhältlich ist, hervorragende Gleise mit guter Traktion herstellen lassen. Ein solcher Teppich besteht aus vielen flexiblen „Streifen“, die durch parallele Fäden miteinander verbunden sind, was zur Entstehung einer Raupe erforderlich ist. Aus der Matte wird ein 1,5-2 cm breiter Streifen geschnitten, der der Breite der verwendeten Räder entsprechen sollte.

Anschließend müssen Sie das Klebeband an den am Fahrgestell befestigten Rädern anbringen und auf die erforderliche Länge zuschneiden. Anschließend werden die Enden des Klebebands mit Sekundenkleber zusammengeklebt. Nachdem der Kleber getrocknet ist, können Sie die Raupe am Fahrgestell ausprobieren und sogar den Motor einschalten – die Raupe dreht sich, fällt aber schnell von den Rädern.


Damit die Raupe auch beim Überfahren von Hindernissen nicht von den Rädern fällt, müssen Sie in der Mitte der Raupe konvexe Anschläge anbringen. Beim Drehen fallen sie in den Spalt zwischen den Rädern und verhindern so, dass sich die Kette löst. Es gibt viele Möglichkeiten, solche Stopps zu machen; ich habe beschlossen, Streichhölzer auf jede „Stufe“ der Raupe zu kleben; wie die Erfahrung zeigt, hat diese Methode funktioniert und bei ausreichender Spannung fiel die Raupe überhaupt nicht ab. Die Streichhölzer werden in 5-6 mm lange Stücke geschnitten und verklebt, wie auf dem Foto unten gezeigt, es wird der gleiche Sekundenkleber verwendet – er sorgt für eine gute Klebefestigkeit mit dem PVC-Mattenmaterial.


Die gleichen Aktionen müssen mit der zweiten Raupe durchgeführt werden.Nach dem Aufkleben der Streichhölzer gelten die Gleise als fertig – nun werden sie auf das Fahrgestell aufgesetzt und können bereits prüfen, wie das zukünftige Auto fahren wird, indem sie die Spannung von der Batterie direkt an beide Motoren anlegen. Bei Bedarf müssen Sie die Spannkraft anpassen – eine zu schwache Raupe dreht sich oder fällt ab, eine zu straffe Raupe dreht sich schwer und belastet den Motor zusätzlich.

Elektrischer Teil
Im elektrischen Teil benötigen Sie mehrere Platinen gleichzeitig: Empfänger- und Senderplatinen zur Übertragung von Befehlen von der Fernbedienung, Aufwärtswandler zur Stromversorgung der Motoren sowie „Brückenplatinen“, damit sich jeder Motor in beide Richtungen drehen kann. Das allgemeine Schema ist wie folgt: Die Senderplatine wird in der Fernbedienung installiert, die Empfängerplatine im Chassis der Maschine. Aufwärtswandler wandeln die Spannung der Batterien (3,7–4,2 Volt) auf einen Wert von 7–8 Volt um, von dem aus die Motoren angetrieben werden. Wenn die Motoren direkt aus der Batterie ausreichend Drehzahl entwickeln, ist der Einbau von Umrichtern nicht erforderlich. Die Drehung der Motoren wird durch Brückenschaltungen gesteuert – spezielle Schaltkreise mit Feldeffekttransistoren, die den Ausgang mit einer Spannung entweder der einen oder der anderen Polarität versorgen können, je nachdem, von welchem Eingang (in 1 oder in 2) das Steuersignal kommt die Empfängerplatine empfängt. Schauen wir uns zunächst die Sender- und Empfängerschaltungen an, die im Folgenden jeweils vorgestellt werden.

Genauer gesagt werden diese Schaltkreise als Encoder und Decoder bezeichnet, und der Empfänger und der Sender sind vorgefertigte RX-TX-Module mit einer Frequenz von 433 MHz, die problemlos bei Ali oder in vielen Radio-Ersatzteilgeschäften gekauft werden können – Jedes der Module verfügt über drei Kontakte zum Anschluss – Power Plus, Minus, sowie einen DATA-Kontakt zum Senden oder Empfangen von Daten.Die oben dargestellten einfachen Schaltkreise stellen ein Datenübertragungsprotokoll bereit, mit dem Sie 5 Tastendrücke verarbeiten können. Um die Maschine zu steuern, benötigen Sie nur 4 Kanäle (vorwärts, rückwärts, rechts, links), sodass der 5. Kanal frei bleibt und für jeden Zweck verwendet werden kann, beispielsweise zum Ein- und Ausschalten der Scheinwerfer. Die TXD- und RXD-Kontakte in den Diagrammen sind mit den DATA-Kontakten des Senders bzw. Empfängers verbunden; ansonsten sind die Diagramme einfach und erfordern kaum eine Erklärung. Die Versorgungsspannung der Stromkreise selbst beträgt 3,5 bis 5 Volt. Wenn Sie jedoch 78l05-Stabilisatoren installieren (sie sind in den Diagrammen angegeben), können Sie sie mit einer Spannung von 7 oder mehr Volt versorgen. Leiterplatten bieten beide Möglichkeiten der Stromversorgung; Sie müssen lediglich Jumper an den richtigen Stellen installieren. Für den Einsatz in einer Maschine können sowohl der Empfänger als auch der Sender ohne Stabilisatoren direkt mit Batterien betrieben werden. Jeder der Schaltkreise verfügt über einen Mikrocontroller – dieser muss mit der entsprechenden Firmware geflasht werden; die Firmware befindet sich zusammen mit den Platinendateien im Archiv.
Archiv mit Schaltplänen, Firmware und Platinen:
Herstellung der Fernbedienung
Als eine Option können Sie eine vorgefertigte Fernbedienung eines kaputten/unnötigen Funkspielzeugs verwenden, sofern darin genügend Platz für die Installation der Encoderplatine vorhanden ist. Oder Sie können Ihre eigene Fernbedienung herstellen, wie ich es getan habe. Als Basis habe ich ein weiteres Stück Sperrholz verwendet und darauf eine Halterung für eine 18650-Batterie, eine Encoderplatine mit Empfängermodul sowie 4 Tasten montiert und diese so angeordnet, dass sie für maximale Bedienfreundlichkeit sorgen.Bitte beachten Sie, dass auf der Encoderplatine bereits Montageplätze für Taster auf der Platine vorhanden sind – deren Einbau ist nicht erforderlich, außer zur Überprüfung der Funktionalität nach der Montage. Die Bedienknöpfe sind über Kabel von der Platine entfernt, wie auf den Fotos unten zu sehen ist.


Montage der Elektronik am Chassis
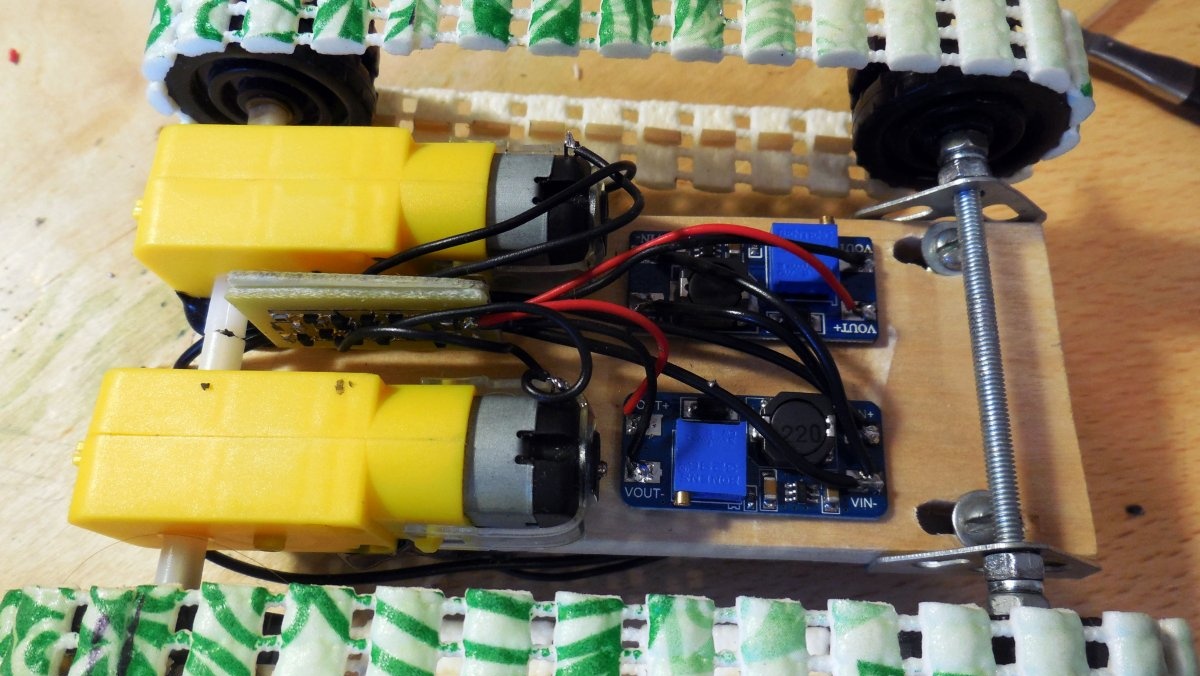
Auf dem Chassis selbst werden daher neben der Decoderplatine mit dem Empfängermodul zwei „Bridge“-Platinen und zwei Konverter verbaut. Das Gute an der Verwendung von zwei Umrichtern, einem für jeden Motor, ist, dass Sie die Geschwindigkeit jeder Spur separat anpassen können. Obwohl die Getriebemotoren identisch sind, weisen sie doch einige Variationen in den Parametern auf, so dass sie selbst bei gleicher Versorgungsspannung leicht unterschiedliche Geschwindigkeiten erzeugen können; durch Anpassung der Spannung am Ausgang der Umrichter kann man die gleiche Geschwindigkeit erreichen. Eine Geschwindigkeitsverzerrung, selbst eine kleine, führt dazu, dass das Auto nicht geradeaus, sondern mit einer leichten Kurve fährt. Unten im Foto sehen Sie alle für die Installation am Chassis erforderlichen Platinen.

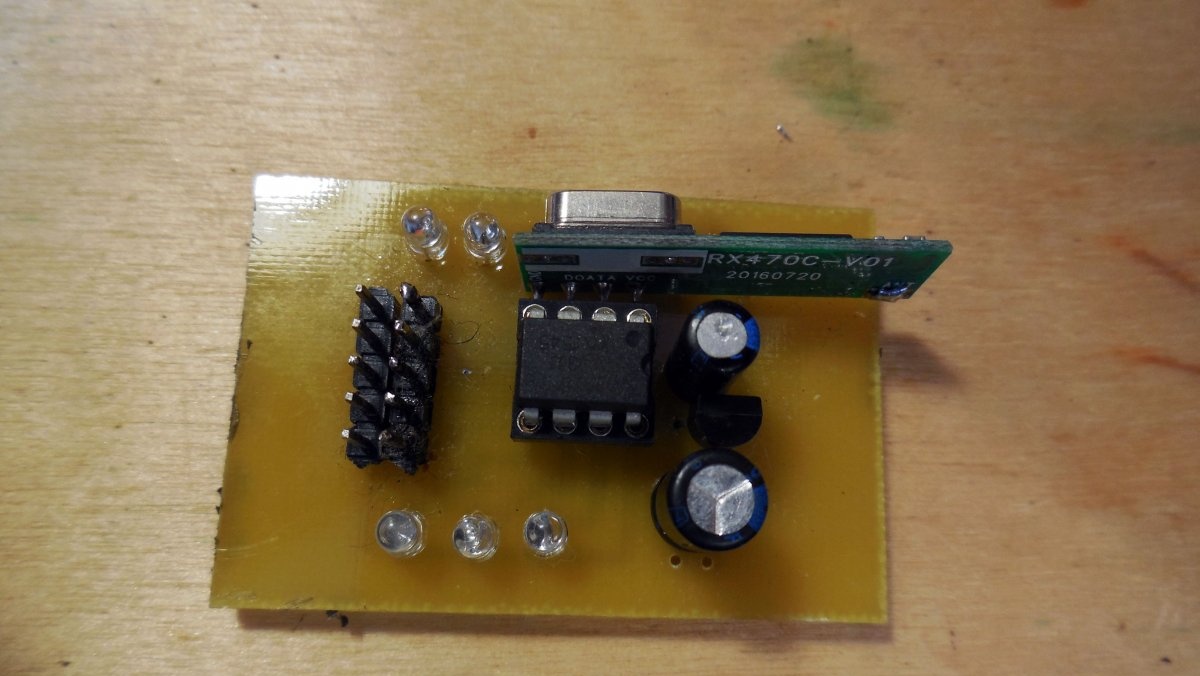
Detailfoto der Decoderplatine. Bitte beachten Sie, dass es wie die Encoderplatine über mehrere zusätzliche Stromversorgungskondensatoren verfügt – diese werden bei Geräten mit Mikrocontrollern definitiv nicht überflüssig sein.
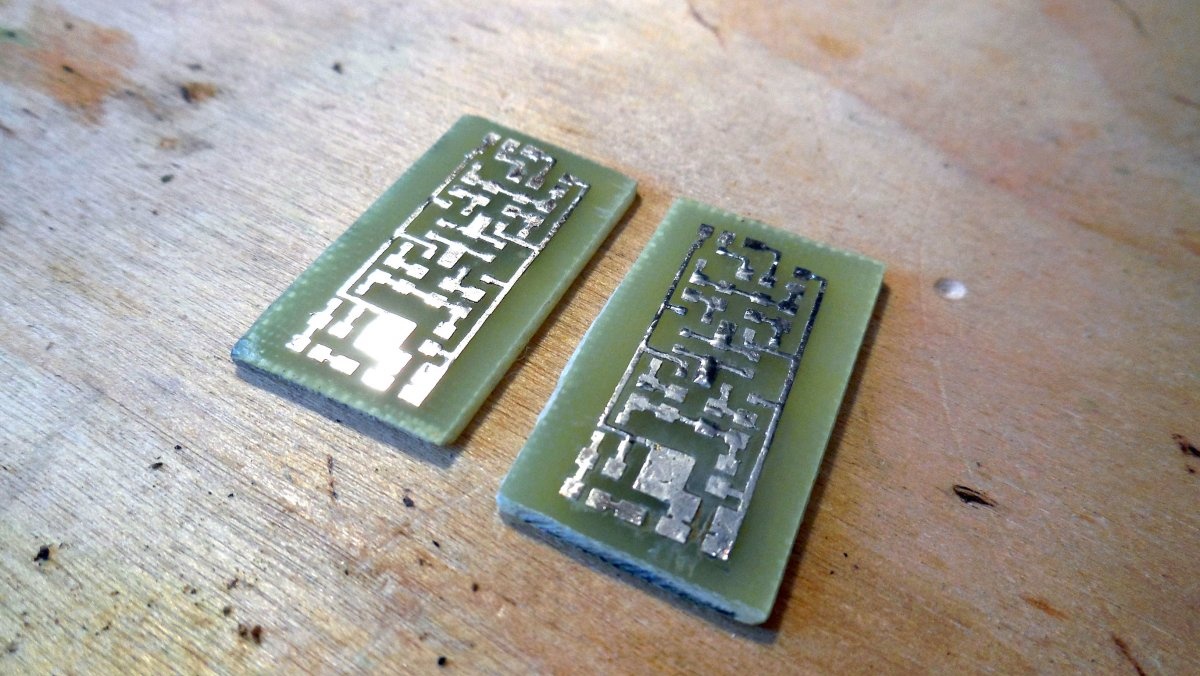
Zusammenbau einer Brückenschaltung
Es scheint, dass eine Art Brückenschaltung erforderlich ist, da es ausreicht, einfach mit einem Schlüssel Spannung an die Motoren anzulegen. Und es ist wirklich nicht nötig, wenn das Auto keinen Rückwärtsgang benötigt – und die Praxis zeigt, dass es ohne ihn überhaupt nicht interessant ist. Daher ist es notwendig, eine kleine zusätzliche Schaltung zusammenzubauen, die einen Polaritätswechsel für den Motor ermöglicht. Die Polarität ändert sich – die Bewegungsrichtung ändert sich.

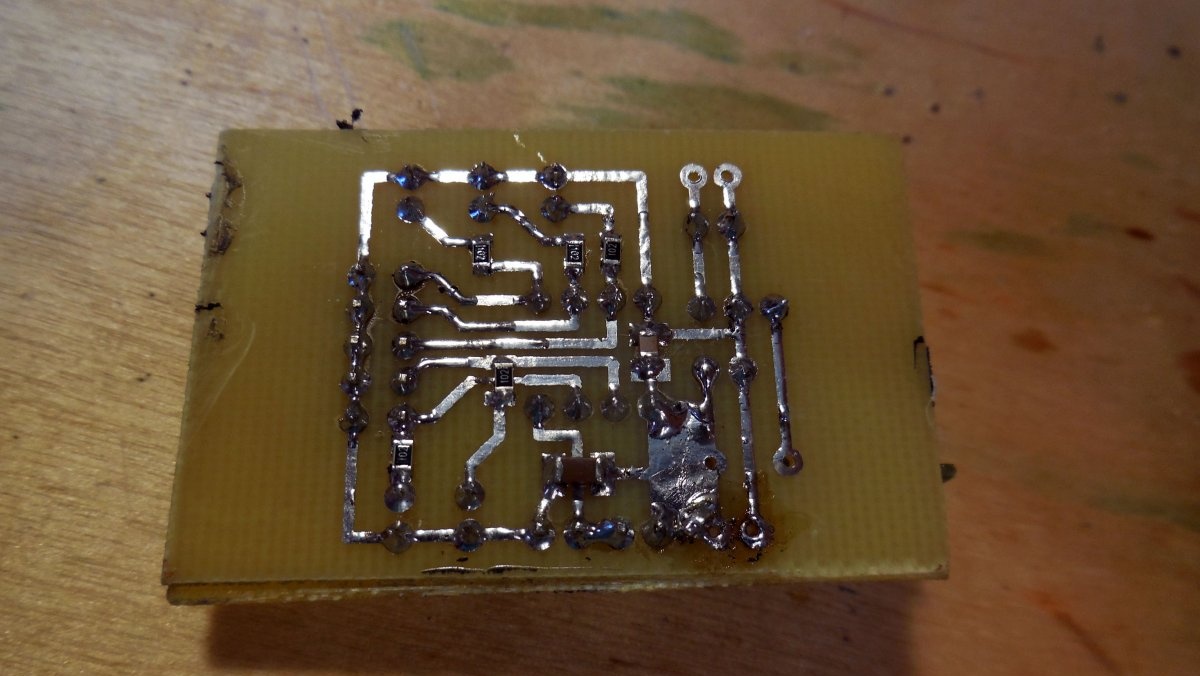
Der Motor ist an diesen Stromkreis angeschlossen und enthält außerdem zwei Eingänge – in1 und in2, legen Sie 3–5 Volt an einen Eingang an – der Motor dreht sich in eine Richtung, legen Sie 3–5 Volt an den anderen an – der Motor dreht sich in die andere Richtung. Wenn an keinem der Eingänge Spannung anliegt oder beide Eingänge gleichzeitig mit Spannung versorgt werden, dreht sich der Motor nicht. Dies ist die einfache Logik des Betriebs. In der Schaltung, die den Motor schalten soll, sind 4 Feldeffekttransistoren verbaut, diese müssen also für einen ausreichend hohen Strom ausgelegt sein. Zwei davon sind N-Kanal, Sie können AO3400 verwenden, die anderen beiden sind P-Kanal, AO3401 ist geeignet. Auf dem Diagramm sind auch zwei bipolare NPN-Transistoren zu sehen; BC847 oder andere ähnliche Transistoren reichen aus. Um nicht viel Platz auf dem Chassis zu beanspruchen, empfehle ich den Aufbau dieser Schaltung mit SMD-Bauteilen. Dioden – beliebig, zum Beispiel 1N4148W. Der Stromeingang dieser Schaltung (bezeichnet als 12 V) wird vom Konverter mit Spannung versorgt. Bitte beachten Sie, dass die Schaltung in zwei Exemplaren aufgebaut werden muss – für den linken bzw. rechten Motor erfolgt die Stromversorgung über einen und der zweite Umrichter. Fotos der zusammengebauten Platinen finden Sie unten.

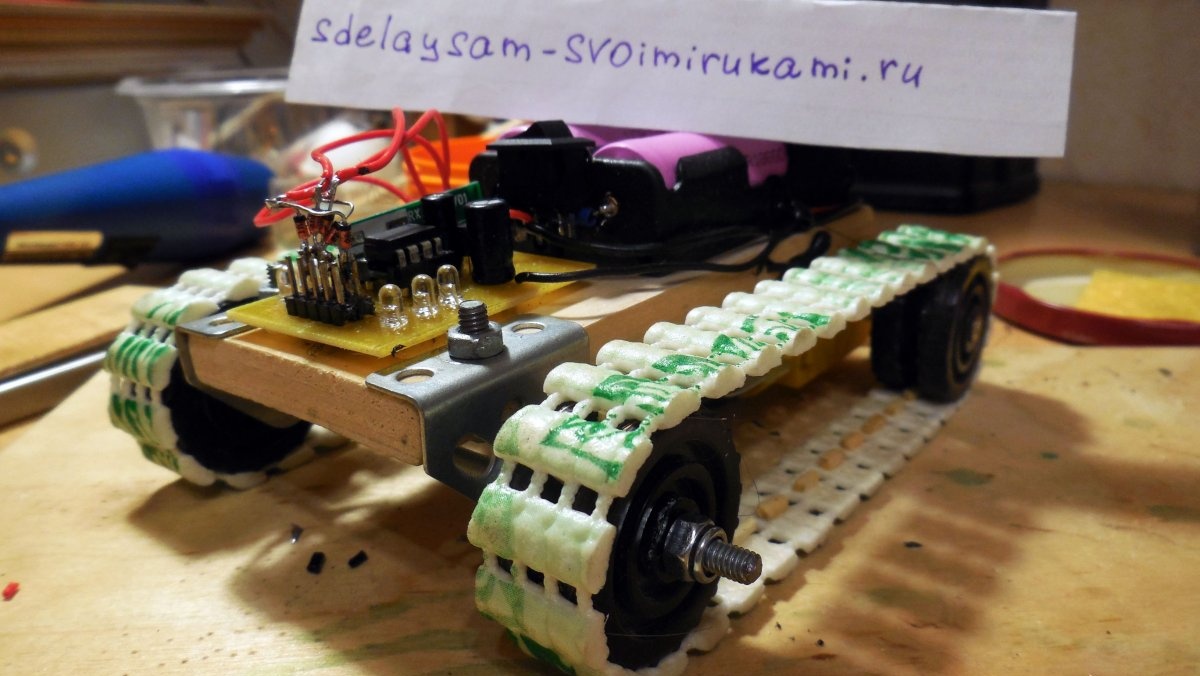
Jetzt können Sie direkt mit der Installation fortfahren – und der erste Schritt besteht darin, ein Paar Halterungen für 18650-Batterien auf der Oberseite des Chassis zu installieren; die gesamte Elektronik wird von ihnen mit Strom versorgt; die Batterien werden parallel geschaltet.

Vor den Batterien ist im vorderen Teil eine Decoderplatine eingebaut, die über einen Schalter sofort mit den Kontakten der Halterungen verbunden werden kann. Der Einfachheit halber verfügt dieses Board zusätzlich über 5 LEDs – Wenn Sie die Tasten der Fernbedienung drücken, leuchten die entsprechenden Tasten auf LEDs.

Im unteren Teil, unter dem Chassis, sind ein Paar Konverter und ein Paar Brückenplatinen angebracht.Alles ist sofort über Kabel verbunden – die Eingänge der Wandler über einen Schalter mit den Haltern, die Ausgänge der Wandler für die Stromversorgung der Brückenplatinen und die Ausgänge der Brücken wiederum mit den Motoren. Es ist zu berücksichtigen, dass Motoren unter Last einen recht großen Strom verbrauchen können; dementsprechend ist der verbrauchte Strom am Eingang der Wandler etwa doppelt so hoch und kann in manchen Momenten 1-1,5 Ampere erreichen, also ist dies notwendig Stromversorgung mit ziemlich dicken Drähten.

Der letzte, letzte Schritt der Montage bleibt bestehen: Sie müssen die Decoderausgänge (4 von 5 Ausgängen werden verwendet) mit den Brückeneingängen (in1, in2) verbinden, damit die Maschine beim Drücken bestimmter Tasten auf der Fernbedienung aktiviert wird reagiert in der gewünschten Weise. Nämlich:
- Durch Drücken von „Vorwärts“ drehen sich beide Motoren in die gleiche Richtung.
- Durch Drücken von „Zurück“ drehen sich beide Motoren in die entgegengesetzte Richtung.
- Durch Drücken von „Rechts“ dreht sich der linke Motor vorwärts, der rechte Motor rückwärts, während sich die Maschine an Ort und Stelle im Uhrzeigersinn dreht.
- Durch Drücken von „Links“ dreht sich der rechte Motor rückwärts, der linke Motor vorwärts, die Maschine dreht sich gegen den Uhrzeigersinn.
- Durch gleichzeitiges Drücken von „Vorwärts“ und „Rechts“ dreht sich der linke Motor vorwärts, der rechte steht still, sodass eine sanfte Drehung erfolgt.
- Das gleichzeitige Drücken von „vorwärts“ und „links“ funktioniert ähnlich, jedoch in die andere Richtung.
Um eine solche Logik zu implementieren, müssen die Decoderausgänge wie unten gezeigt mit den Brückeneingängen verbunden werden.
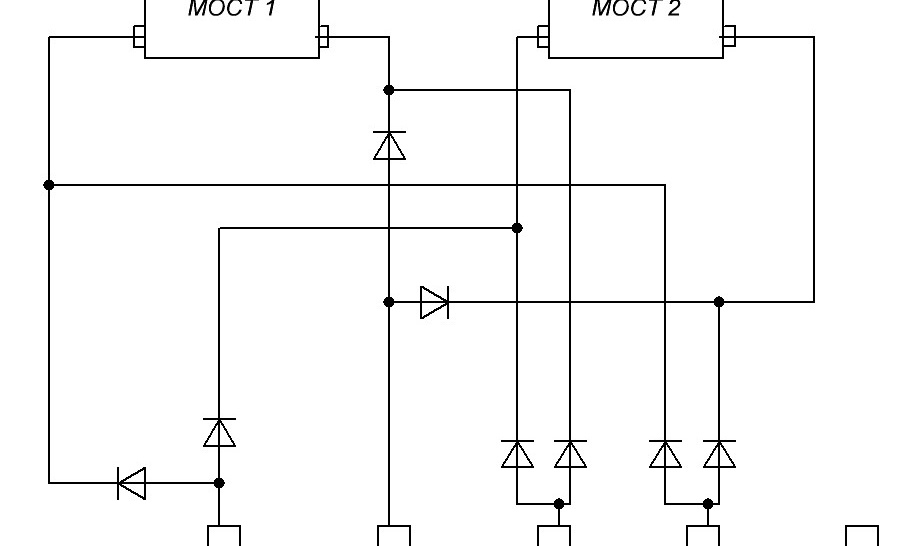
Die Decoder-Ausgänge sind unten dargestellt, einer davon ist frei und kann für andere Aktionen verwendet werden. Als Dioden können hier die gleichen 1N4148-Dioden verwendet werden, die durch Oberflächenmontage direkt an die Decoder-Ausgänge gelötet werden.
Tests
An diesem Punkt ist der Zusammenbau der Maschine abgeschlossen, Sie können die Batterien einlegen und den Betrieb überprüfen. In diesem Fall wäre es nicht verkehrt, den Stromverbrauch zu überprüfen – wenn keine Befehle von der Fernbedienung vorliegen, sollte er gering sein, etwa mehrere zehn mA. Die Reichweite der Fernbedienung hängt von den verwendeten Empfänger- und Sendermodulen ab – in den meisten Fällen bieten sie unter städtischen Bedingungen einen zuverlässigen Empfangsbereich von etwa 20 bis 30 Metern, was für die Steuerung der Maschine völlig ausreicht. Antennen tragen dazu bei, die Reichweite deutlich zu erhöhen; Sie können 17 cm lange Kupferdrahtstücke (für eine Frequenz von 433 MHz) nehmen und diese an die „Ameisen“-Kontakte der Module anlöten.


Das Ergebnis ist ein sehr unterhaltsames Spielzeug für Kinder und Erwachsene – die PVC-Mattenschienen sorgen für hervorragenden Halt auf jedem Untergrund, sodass die Maschine problemlos Hindernisse überwinden kann. Zu den Vorteilen der Raupenversion gehört auch die einfache Steuerung – der Einbau zusätzlicher Lenkmechanismen ist nicht erforderlich, die gesamte Steuerung erfolgt nur durch Änderung der Drehrichtung der Raupen. Als Nachteil der beschriebenen Fahrwerkskonstruktion kann man die geringe „Bodenfreiheit“ bezeichnen – die Motoren befinden sich unter dem Boden und nehmen dort recht viel Platz ein, was dem Fahrspaß jedoch keinen Abbruch tut, und wenn ja Wenn gewünscht, kann dieser Nachteil durch den Einbau einer zusätzlichen Achse für die Hinterräder und die Platzierung der Motoren oben behoben werden. Viel Spaß beim Bauen!











